Agriculture Operational Robotic Platform
Further development of digital and robotic systems based on data exchange ecosystems and services based on their semantic processing to provide knowledge and tools that will increase efficiency, ensure safety, and confirm product quality in the supply chain, while reducing costs and providing valuable and up to date information to farmers.
Challenges
One of the significant challenges faced by agricultural robots connected to the cloud is the delay in accessing data. This latency occurs when the robot retrieves information from cloud-based storage or servers. Such delays can impede real-time decision-making and the execution of time-sensitive tasks, such as analyzing soil conditions, monitoring crop health, and performing precise farming operations. These inefficiencies can lead to suboptimal agricultural productivity and delayed interventions, which are critical for maintaining the health and yield of crops. Ensuring faster and more reliable data access is essential to overcoming this challenge and enhancing the overall performance of agricultural robotics.
Efficiently utilizing edge-to-cloud resources is a major challenge for agricultural robots. This involves balancing on-site (edge) processing for real-time tasks with cloud-based computing for intensive data analysis and storage. Key challenges include data management, dynamic resource allocation, network reliability, energy efficiency, and security. Overcoming these is crucial for optimizing the robots' performance and enhancing agricultural productivity.
Benefits
- Reduction of decision-making latency
- Improved AI models
- Increased system availability
- Predictive maintenance
Infrastructure and devices
The main two devices, considered to function as testbeds, hosting ICOS are described as Robot(s) and User Panel(s). As shown in Figure 1, Robot is equipped with an industrial boxed computer. This computer is connected to the robot's internal control board using a CAN-USB adapter to send control commands to the robot's actuators and read their statues. Additionally, the onboard computer is connected to a WIFI LTE guarantee connectivity to the local network and Internet. Imagery sensors, for instance, RGB and RGB-D cameras are utilised for image processing tasks and other sensors such as IMU and GNSS modules are used for precise localization.
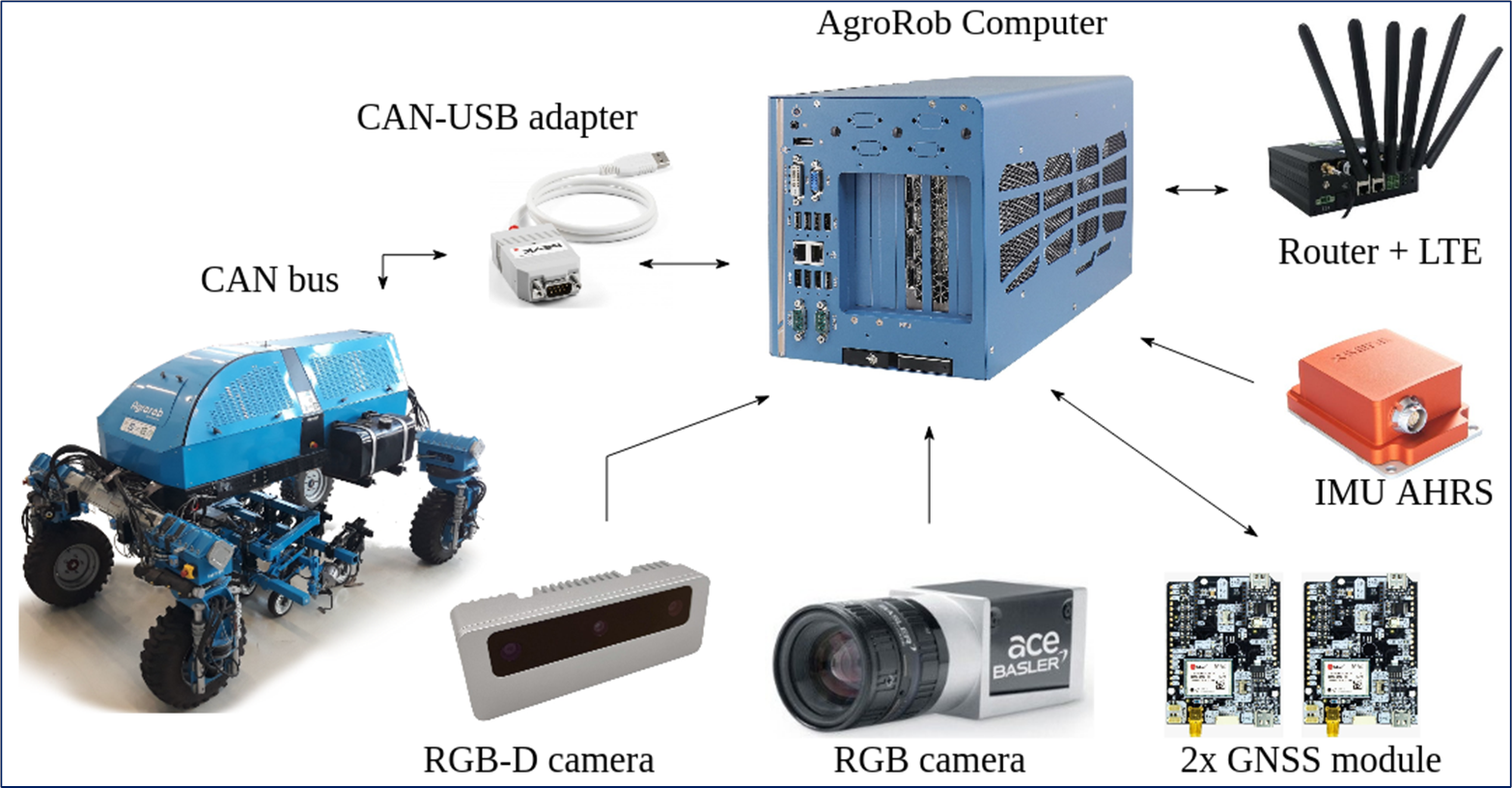
Figure 1: Robot’s hardware setup
User Panel, defined as a portable computer equipped with a screen is considered to be used as the hardware for hosting user panel SW, as illustrated in Figure 2.

Figure 2: Use case 1 infrastructure setup and devices
Architecture
The use case architecture can be described as a robot operating in the field, executing a given task. Depending on the mission, the robot can take advantage of cloud computing, for instance, for detecting weeds and crops. The data generated as a result of the mission, along with the status and record of the operation in the field, is sent to cloud infrastructure. The cloud processes analyze the farm condition and robot health and generate a farm yield map (as shown in Fig. 3). This generated data is then sent to the robot as the next task and mission to be executed on the farm. For instance, the robot might need to spray the part of the farm where weak crop conditions were previously detected.
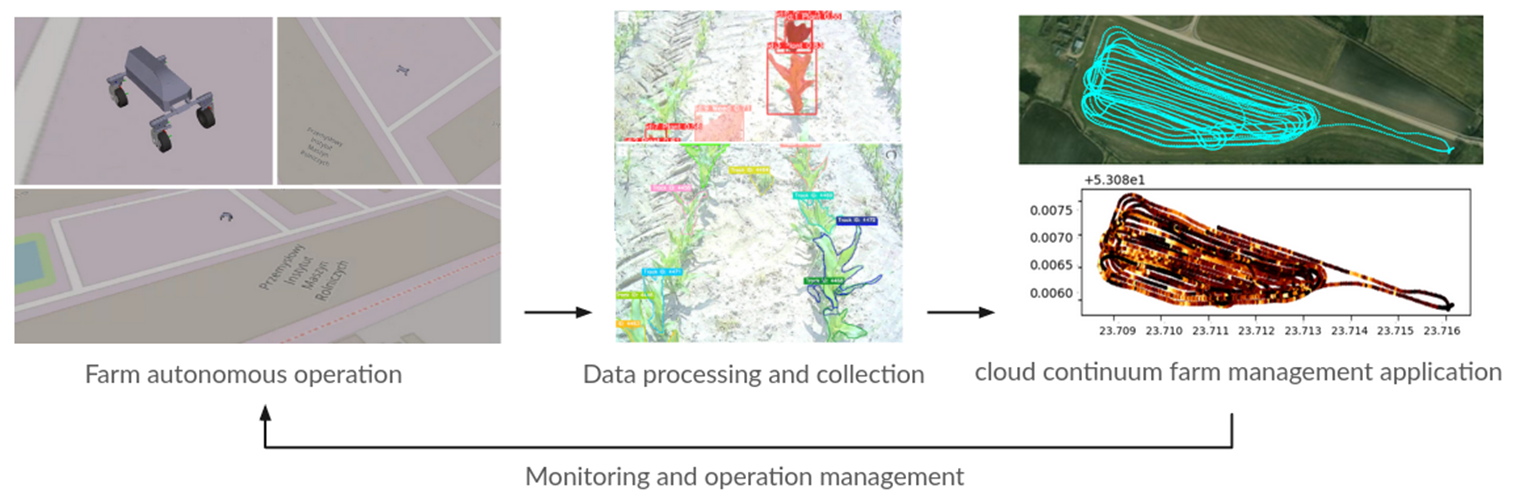
Figure 3: architecture use case system architecture
 Poznan, Poland
Poznan, Poland


This project has received funding from the European Union’s HORIZON research and innovation programme under grant agreement No 101070177.